ElasticSearch集群 - 概念
主要介绍elasticsearch集群的相关内容。
参考资料
集群
单机的elasticsearch做数据存储,必然面临两个问题:
- 海量数据存储问题:将索引库从逻辑上拆分为N个分片(shard),存储到多个节点;
- 单点故障问题:将分片数据在不同节点备份(replica )。
ES集群相关概念
集群(cluster):一组拥有共同的 cluster name 的 节点。
节点(node):集群中的一个 Elasticearch 实例
分片(shard):索引可以被拆分为不同的部分进行存储,称为分片。在集群环境下,一个索引的不同分片可以拆分到不同的节点中
解决问题:数据量太大,单点存储量有限的问题。
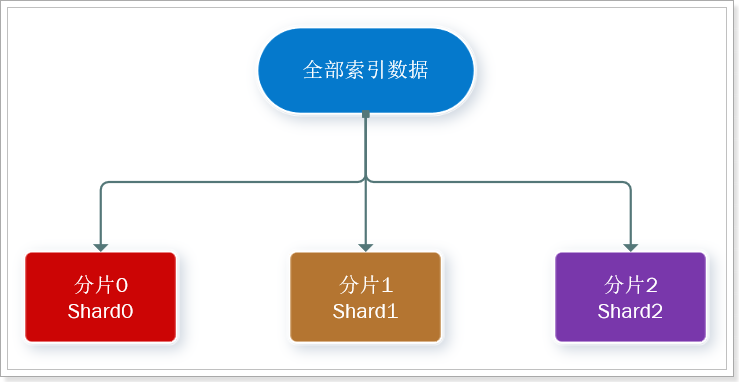
此处,我们把数据分成3片:shard0、shard1、shard2
主分片(Primary shard):相对于副本分片的定义。
副本分片(Replica shard)每个主分片可以有一个或者多个副本,数据和主分片一样。
数据备份可以保证高可用,但是每个分片备份一份,所需要的节点数量就会翻一倍,成本实在是太高了!
为了在高可用和成本间寻求平衡,我们可以这样做:
- 首先对数据分片,存储到不同节点
- 然后对每个分片进行备份,放到对方节点,完成互相备份
这样可以大大减少所需要的服务节点数量,如图,我们以3分片,每个分片备份一份为例:
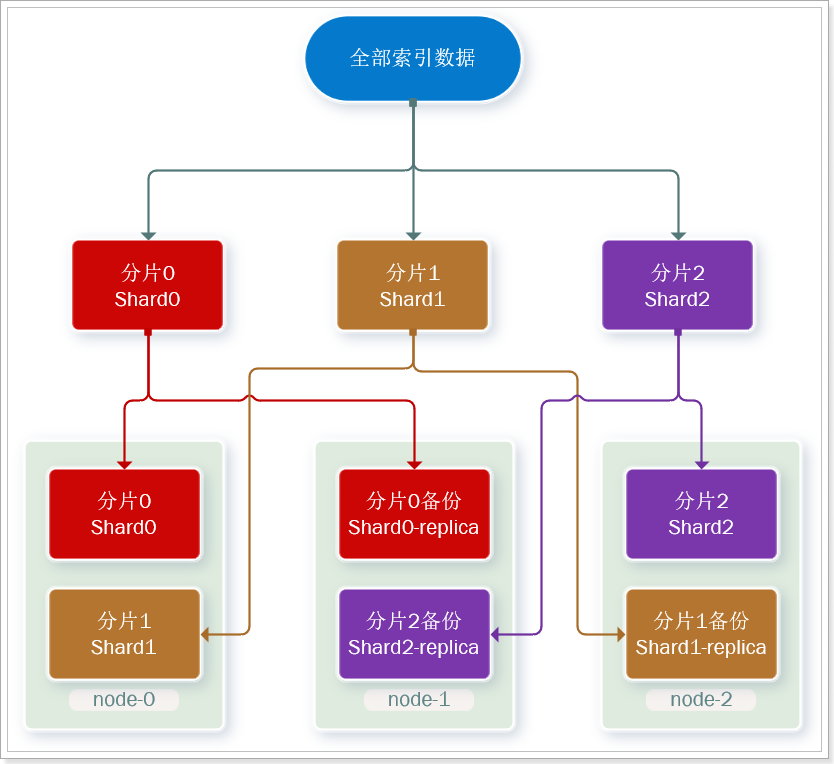
现在,每个分片都有1个备份,存储在3个节点:
- node0:保存了分片0和1
- node1:保存了分片0和2
- node2:保存了分片1和2
集群脑裂问题
集群职责划分
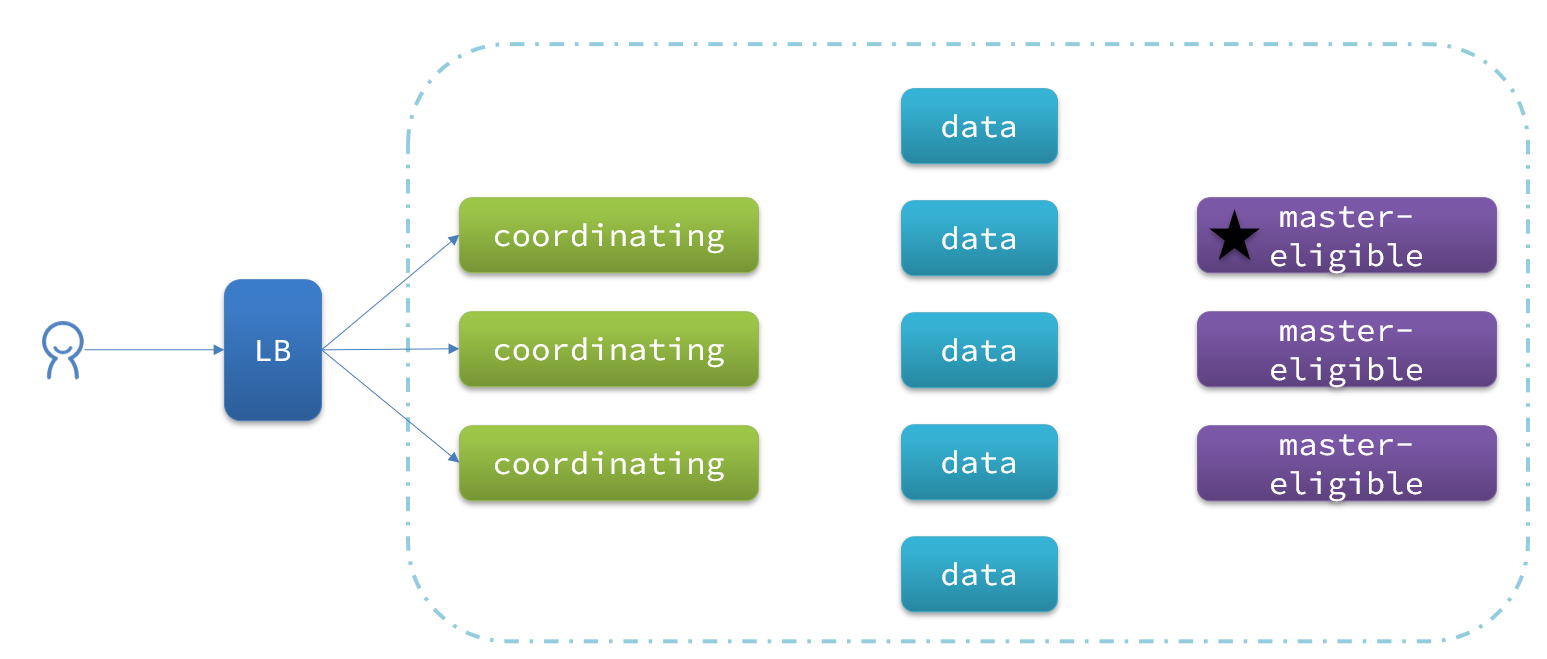
elasticsearch中集群节点有不同的职责划分:
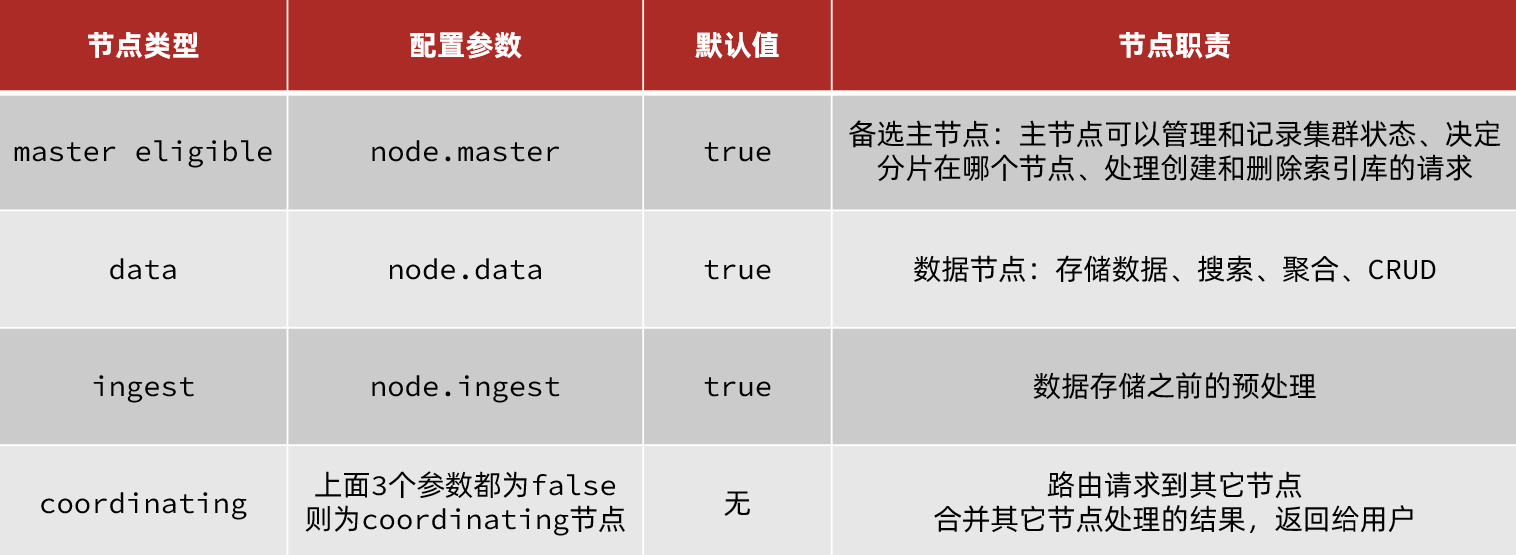
默认情况下,集群中的任何一个节点都同时具备上述四种角色。
但是真实的集群一定要将集群职责分离:
- master节点:对CPU要求高,但是内存要求低
- data节点:对CPU和内存要求都高
- coordinating节点:对网络带宽、CPU要求高
职责分离可以让我们根据不同节点的需求分配不同的硬件去部署。而且避免业务之间的互相干扰。
一个典型的es集群职责划分如图:
脑裂问题
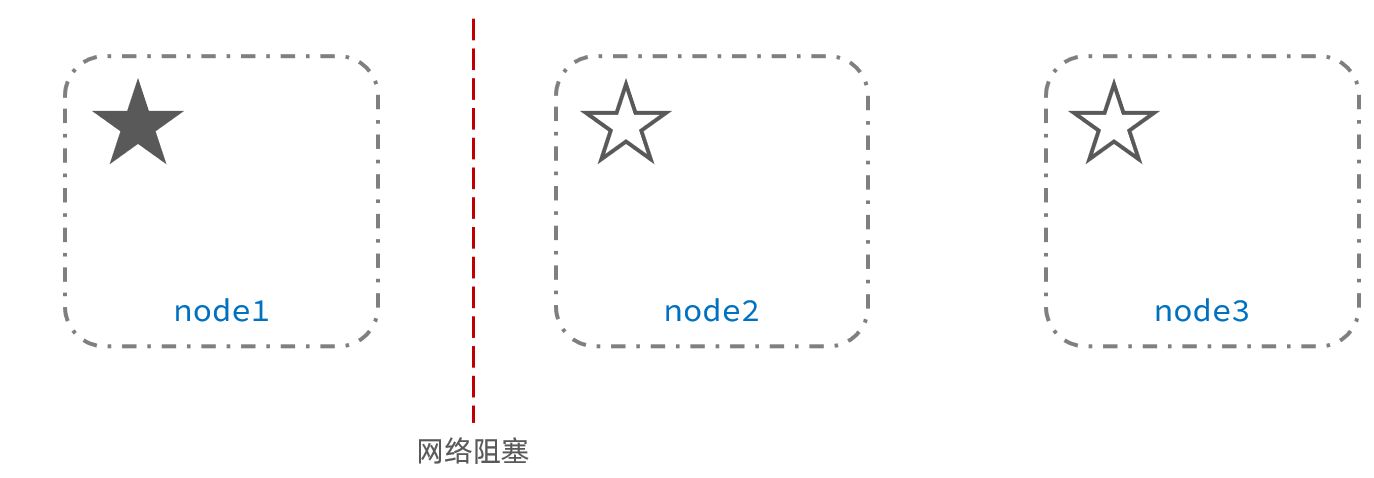
脑裂是因为集群中的节点失联导致的。
例如一个集群中,主节点与其它节点失联:
此时,node2和node3认为node1宕机,就会重新选主:
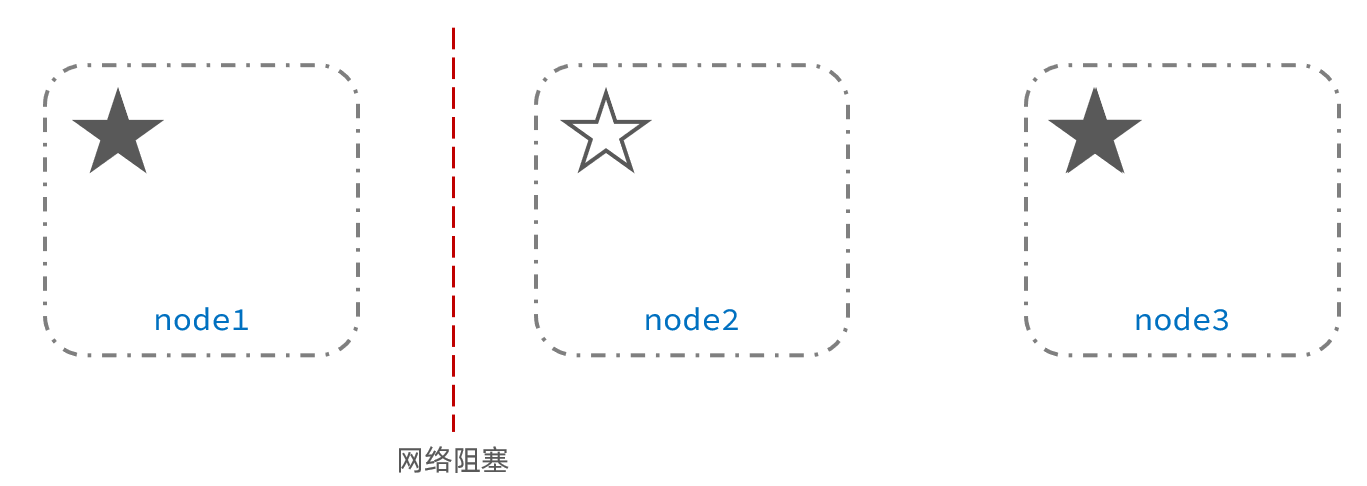
当node3当选后,集群继续对外提供服务,node2和node3自成集群,node1自成集群,两个集群数据不同步,出现数据差异。
当网络恢复后,因为集群中有两个master节点,集群状态的不一致,出现脑裂的情况:
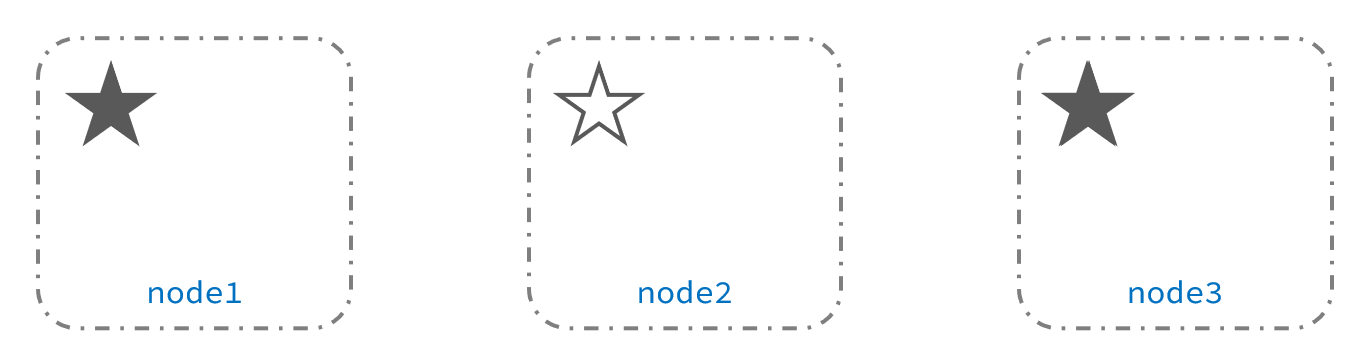
解决脑裂的方案是,要求选票超过 ( eligible节点数量 + 1 )/ 2 才能当选为主,因此eligible节点数量最好是奇数。对应配置项是discovery.zen.minimum_master_nodes, 在es7.0以后,已经成为默认配置,因此一般不会发生脑裂问题
例如:3个节点形成的集群,选票必须超过 (3 + 1) / 2 ,也就是2票。node3得到node2和node3的选票,当选为主。node1只有自己1票,没有当选。集群中依然只有1个主节点,没有出现脑裂。
小结
master eligible节点的作用:
- 参与集群选主
- 主节点可以管理集群状态、管理分片信息、处理创建和删除索引库的请求
data节点的作用:
- 数据的CRUD
coordinator节点的作用:
- 路由请求到其它节点
- 合并查询到的结果,返回给用户
集群分布式存储
当新增文档时,应该保存到不同分片,保证数据均衡,那么coordinating node如何确定数据该存储到哪个分片呢?
分片存储测试
已在 * 安装ES集群 中测试。
4.3.2.分片存储原理
elasticsearch会通过hash算法来计算文档应该存储到哪个分片:

说明:
- _routing默认是文档的id
- 算法与分片数量有关,因此索引库一旦创建,分片数量不能修改!
新增文档的流程如下:
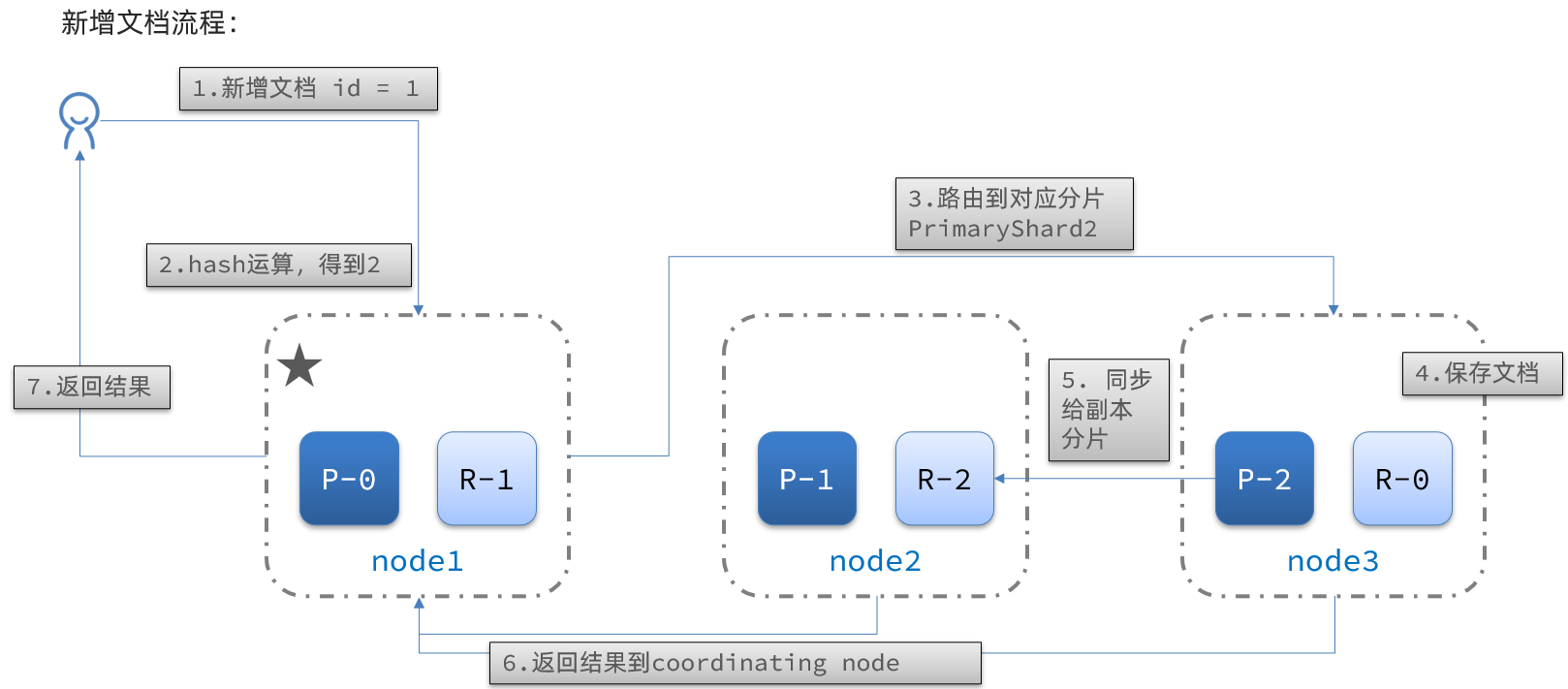
解读:
- 新增一个id=1的文档
- 对id做hash运算,假如得到的是2,则应该存储到shard-2
- shard-2的主分片在node3节点,将数据路由到node3
- 保存文档
- 同步给shard-2的副本replica-2,在node2节点
- 返回结果给coordinating-node节点
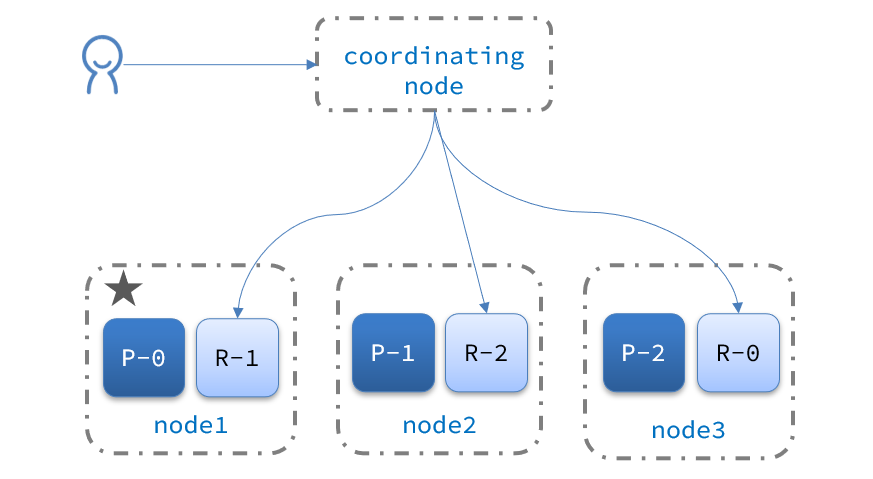
集群分布式查询
elasticsearch的查询分成两个阶段:
- scatter phase:分散阶段,coordinating node会把请求分发到每一个分片
- gather phase:聚集阶段,coordinating node汇总data node的搜索结果,并处理为最终结果集返回给用户
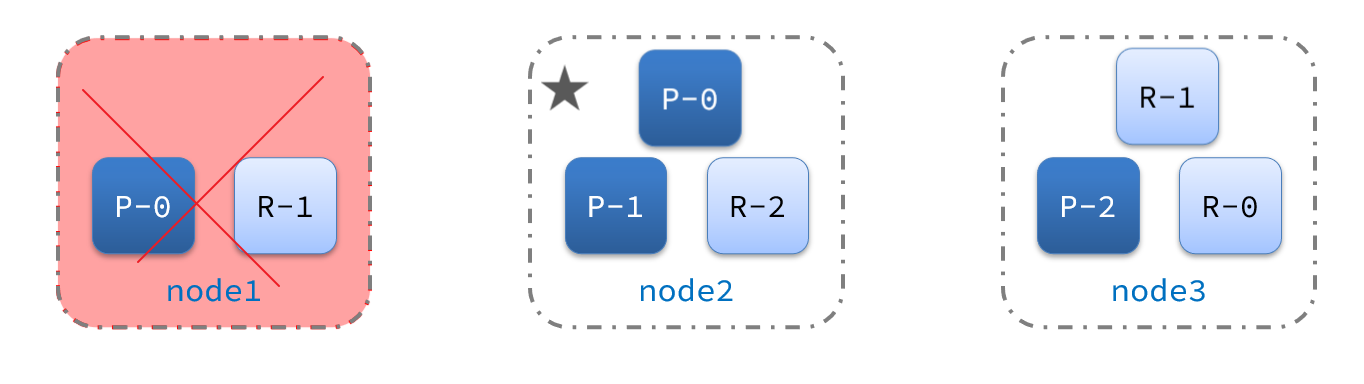
集群故障转移
集群的master节点会监控集群中的节点状态,如果发现有节点宕机,会立即将宕机节点的分片数据迁移到其它节点,确保数据安全,这个叫做故障转移。
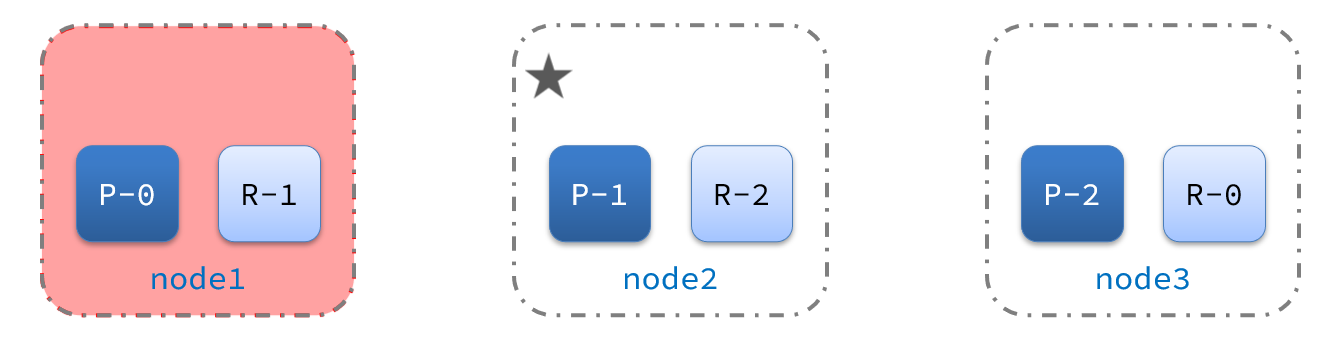
1)例如一个集群结构如图:
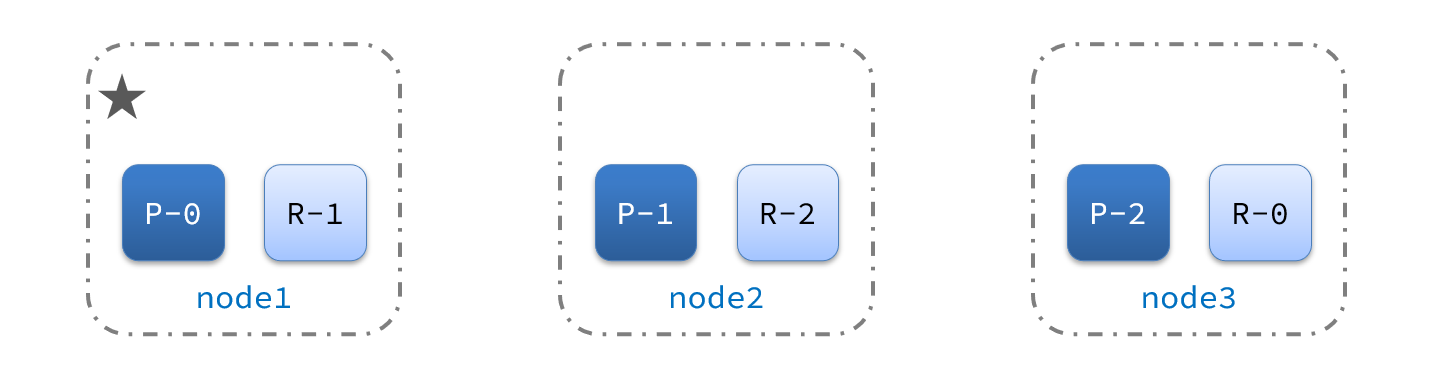
现在,node1是主节点,其它两个节点是从节点。
2)突然,node1发生了故障:
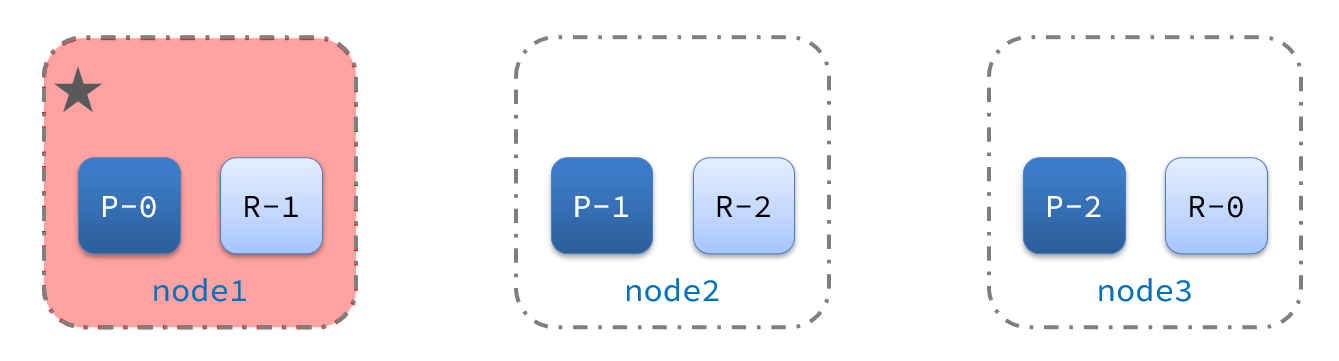
宕机后的第一件事,需要重新选主,例如选中了node2:
node2成为主节点后,会检测集群监控状态,发现:shard-1、shard-0没有副本节点。因此需要将node1上的数据迁移到node2、node3: